EKF에 대해 리뷰해보겠습니다. 아래 유튜브가 EKF에 대해 굉장히 쉽게 설명하여 많은 도움을 얻었습니다.
참고자료
- 제어공학 수업자료
- Probabilistic Robotics
https://youtu.be/9X3jGGnbcvU?si=qCTI6pfvvzVehR-t&t=204
앞선 포스트에서 말했다시피 , EKF는 KF에서 있는 시스템의 선형화 가정을 완화한 필터입니다.
따라서 실제 존재하는 비선형 시스템에 적용했을 때, 이점을 얻게 됩니다.
기본적인 뼈대는 Kalman filter와 같지만, 시스템을 A,B와 같은 행렬이 아니라 비선형 term으로 표현합니다.

*noise, 초기값에 대한 가정은 kalman filter와 동일합니다.
기존에 있던 prediction과 correction은 선형 시스템을 대상으로 만들어진 수식이기에 , 당연히 비선형 시스템에는 적용이 안됩니다.
하지만 비선형 시스템을 그대로 다루는 것은 어려운 일이기에 EKF에서는 시스템에 대한 선형화 linearization 를 진행합니다.
여기서 first order Taylor series expansion을 사용하여 비선형 시스템을 선형으로 근사합니다.
이게 뭐지 .. 싶을 수도 있지만 사실은 단순합니다.
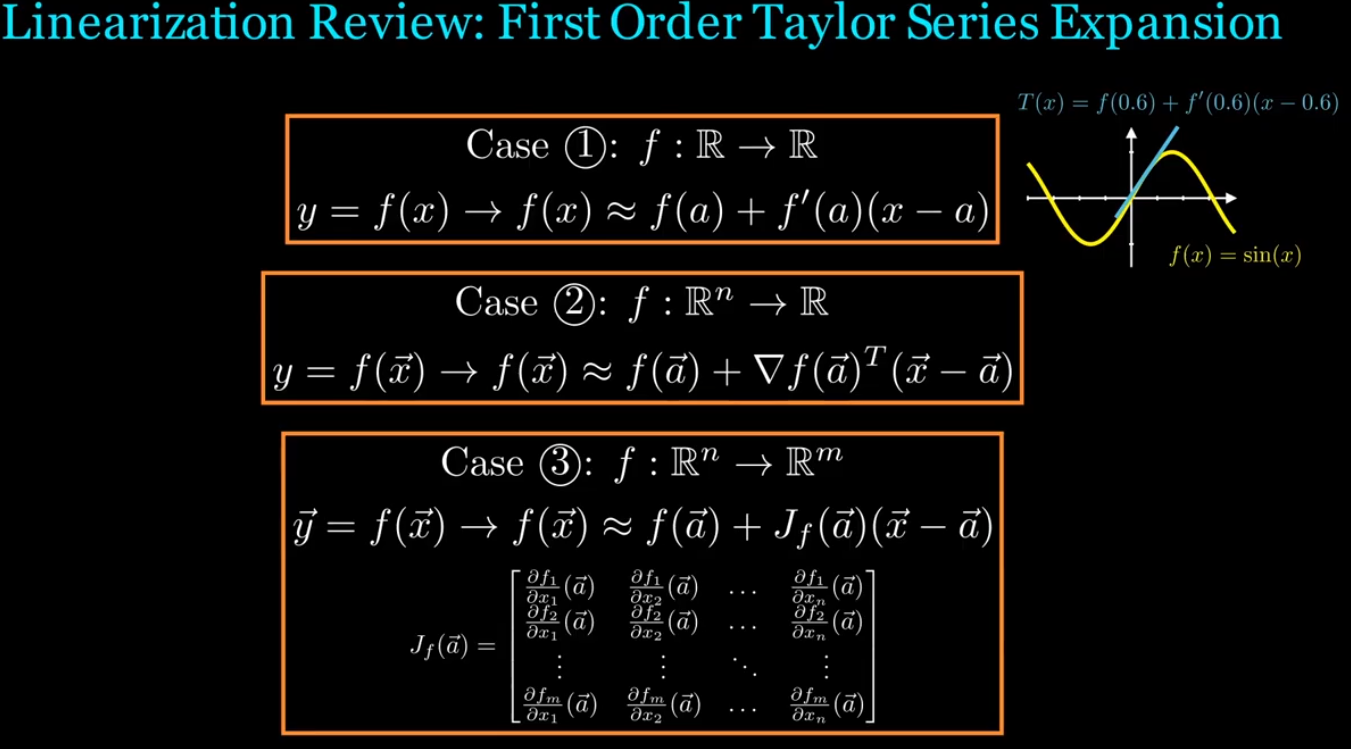
first order Taylor series expansion은 Taylor series의 1차항까지를 썻다고 해서 하는 말이고 ,
사실은 해당 지점에서의 접선의 방정식을 의미합니다 ㅎㅎ

우리가 쓰는 시스템은 n 차원의 상태에서 m을 매핑하기에 ,
단순 미분이 아닌 사전지식에서 언급한 jacobian을 통해 선형 근사를 하게 되는 것입니다 ㅎㅎ
이렇게 비선형 시스템 g와 h를 선형화하는 방법을 통해 아래의 EKF 를 수행합니다.

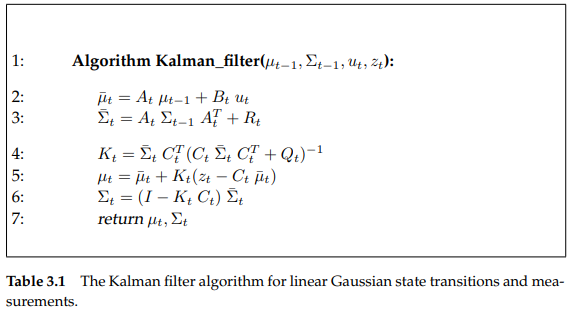
KF 와 비교하며 어떤게 달라졌는지 확인해봅시다.
2: 에서 선형인 A,B를 EKF에서는 g로 표현함을 알 수 있습니다.
5: 에서의 식도 동일합니다.
여기서 3:과 4에서 G,H를 확인할 수 있는데
G는 비선형 함수 g에 대한 이전 시점 상태 평균 (t-1)에서의 jacobian 이고,
H는 비선형 함수 h에 대한 이번 시점(t) 상태의 prediction 평균에서의 jacobian입니다.
또한 해당 수식에서의 g,h 선형화는 아래와 같습니다.
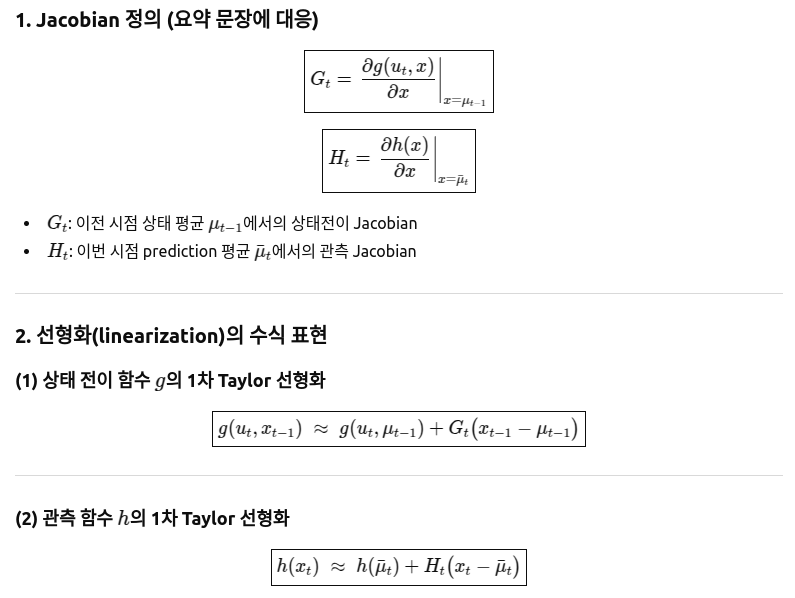
현재 가지고 있는 값에 대한 함수값과 기울기를 가지고 인접한 부분에 대한 함수값을
해당 점 근처에서 유효한 직선의 방정식을 통해 구하는 것이 선형화입니다.
*여기서 헷갈릴 수 있는데 비선형이라고 해서 unknown인 시스템인게 아니라 단지 다루기 힘든 시스템이라 선형화를 진행하는 것입니다. 알고있는 함수에 대입하여 Taylor의 0차를 구합니다 ㅎ ( 전 헷갈렸었음 )
요렇게 해서 EKF 를 전부 확인해보았습니다. 추가로 시간이 된다면 code에서의 사용 , sensor fusion에서 EKF를 사용하는 이유 등을 알아보려고 합니다 . 감사합니다.

오류와 수정사항 환영합니다.
'robotics' 카테고리의 다른 글
| PnP : Perspective-n-Point (1) | 2026.02.27 |
|---|---|
| EKF - Kalman filter (0) | 2026.01.27 |
| EKF_ 사전지식 ( covariance matrix , Jacobian , Gaussian ) (1) | 2026.01.27 |